System Safety |
Operational Design Domain (ODD) |
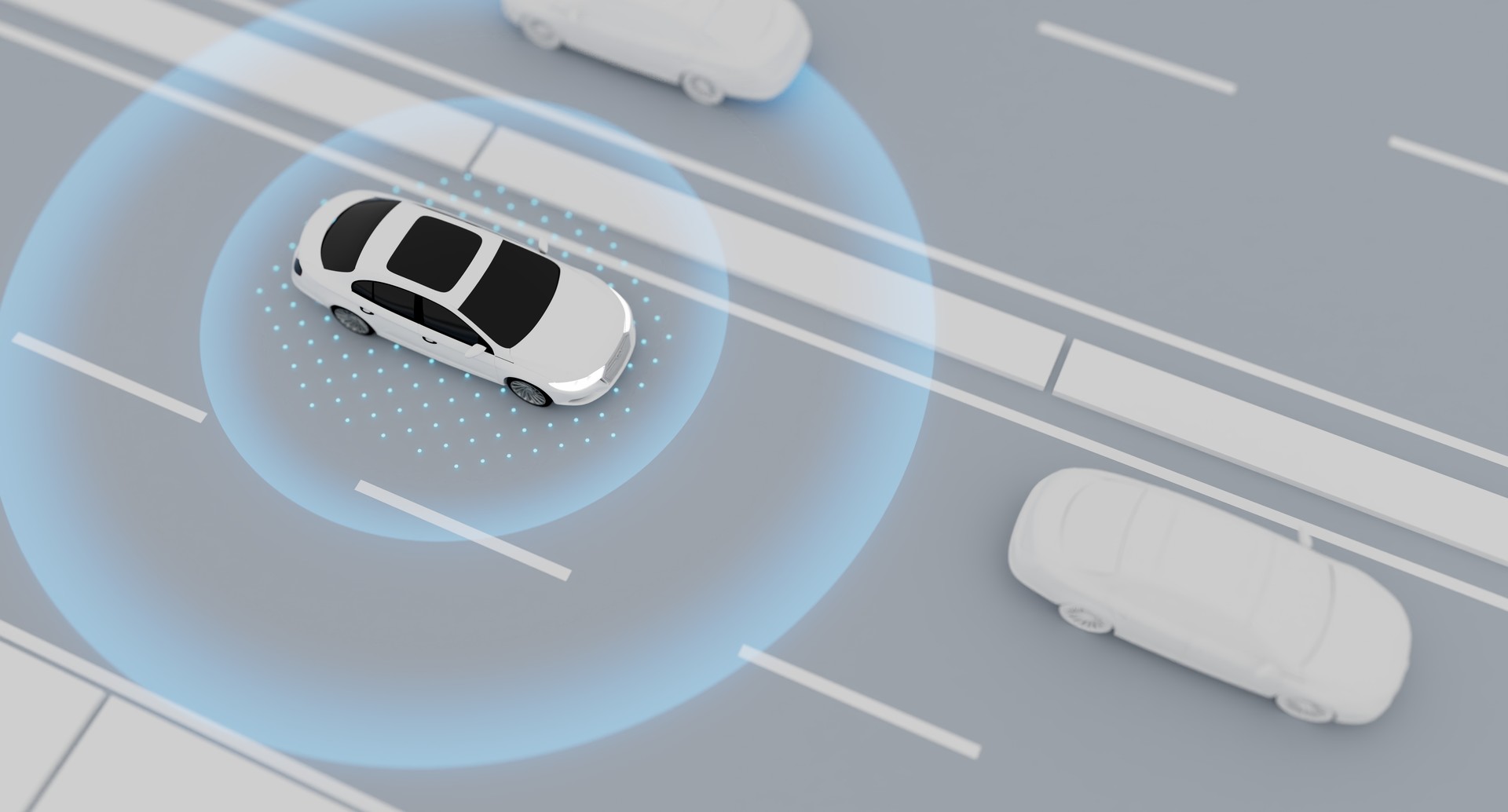
Object and Event Detection and Response (OFDR) |
Fallback (Minimal Risk Condition) |
Vehicle Methods |
Human Machine
Interface (HMI) |
 Vehicle Cybersecurity Vehicle Cybersecurity |
|  Post-Crash ADS Behavior |
 Data Recording |
Consumer Education
and Training |  Federal, States,
and Local Laws |

System Safety |
Operational Design Domain (ODD) |
Object and Event Detection and Response (OFDR) |
Fallback (Minimal Risk Condition) |
 Vehicle Methods Vehicle Methods |
Interface (HMI) |  Vehicle Cybersecurity |
Crashworthiness |
 Post-Crash ADS Behavior |
Data Recording |  Consumer Education and Training |  Federal, States, and Local Laws |
 | Company Technology Mobility Service Careers↗ |
주소본사 경북 경산시 하양읍 가마실길 50, 실습동(38428) | SNS네이버블로그 ↗인스타그램 ↗ 페이스북 ↗ 링크드인 ↗ 유튜브 ↗ | 오토노머스에이투지 | 대표자 한지형 | 대표번호 070-5066-4910 | 사업자등록번호 282-81-01099 |  |
 SNS 네이버블로그 ↗ | Company Technology Mobility Service Careers↗ 개인정보처리방침 서비스이용약관 브랜드 센터 |
본사 경북 경산시 하양읍 가마실길 50, 실습동 |